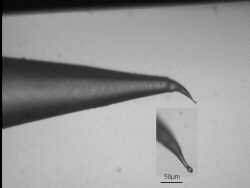
Mikro-Vakuum-Greifer bestehen aus Glaskapillaren
und können bis zu einem Spitzendurchmesser von 10 µm eingesetzt
werden, um kleine Objekte zu handhaben.
Die Spitze der Glaskapillare ist angeschliffen und feuerpoliert,
um eine hohe Wirksamkeit des Vakuums zu erreichen. Mikro-Vakuum-Greifer
sind besonders gut einzusetzen, wenn sich die Objekte nicht von
der Seite her kraftschlüssig greifen lassen.
Mikro-Vakuum-Greifer können motorisch um die Längsachse rotiert
werden, um das Werkstück horizontal zu drehen. Vakuumgreifer, die
horizontal rotierten, sind für viele Montageaufgaben die optimale
Lösung. Von Bedeutung ist dabei, daß der Rotationswinkel mit hoher
Auflösung definiert werden kann.
Wir können mit diesen Vorgaben Vakuumgreifer aufbauen, die Werkstücke
bis zu einer Größe von wenigen Mikrometern handhaben können.
Altenativ zu Glaskapillaren setzen wir auch Konturgreifer ein,
die exakt an die Werkstücke angepasst werden. Zum Einsatz kommen
sie bei Objekten, bei denen man die Öberfläche nicht überall
berühren darf.
Zusätzlich besteht die Möglichkeitmehrere
einzelne Greifer zu einem Wechselgreifersystem aufzubauen.
Bei diesen Systemen wird immer der gewünschte Greifer unter
eine Kamera oder ein Mikroskop verfahren, um das entsprechende Werkstück
per Bilderkennung zufinden oder um die Greiferoperationen zu teachen.
Mikro-Elastomeren-Greifer
dienen zur verletzungsfreien Aufnahme von Miniaturobjekten. Sie
werden aus unterschiedlichen Kunststoffen hergestellt.
Charakteristisch ist ihre Resistenz gegen elektro-statische Ladungen
und ihr Reibungskoeffizient, der dem Material angepaßt werden kann.
Sie können je nach Bedarf der Montageobjekte als hochelastisch oder
steif aufgebaut werden. Es hat sich erwiesen, daß eine kugelförmige
Spitze das Greifen unterschiedlichster Materialien begünstigt. Mikro-Elastomeren-Greifer
können wir bis zu einen Spitzendurchmesser von 5 µm herstellen.
Beide
Greiferfinger werden durch Kleinstschritt-motoren angetrieben und
erlauben ein- oder beidarmiges Aufnehmen des Werkstückes. Alle Greiferpositionen
können durch Teachen festgelegt werden.
Kraftschlüssige
Greifer können extrem miniaturisiert und in vielfältigen Formen
mittels RMPD (Rapid Mikro Product Development) hergestellt werden.
Das Werkzeug wird dabei durch Photoinitiation mit dem Laser aus
flüssigen Akrylaten oder Epoxiden gefertigt.
Der dargestellte Greifer wird durch eine integrierte Glasfaser geöffnet
und schließt sich dadurch, daß der Mikromagnet in der beweglichen
Greiferschere durch ein elektrisches Feld bewegt werden kann und
hinreichend Kraft aufbaut, um ein Werkstück sicher, aber verletzungsfrei
zu greifen.